
Tính năng của trình điều khiển động cơ bước TB6600
TB6600 là trình điều khiển động cơ bước chuyên nghiệp dễ sử dụng mà bạn có thể điều chỉnh các bước nhỏ của nó. Mô-đun này có thể điều khiển động cơ bước hai pha. Một tính năng chính của mô-đun này là bạn có thể thay đổi cài đặt microstep bằng các công tắc tích hợp trên trình điều khiển.Các mô-đun này có một số chức năng an toàn như sau:
- Bảo vệ quá dòng
- Bảo vệ sụt áp
- Bảo vệ quá nhiệt


Bạn có thể tải xuống biểu dữ liệu của mô-đun này tại đây.
Bảng dữ liệu trình điều khiển động cơ bước TB6600 4A
Sơ đồ chân của trình điều khiển động cơ bước TB6600
Mô-đun này có các chân sau:Nguồn
- VCC : Nguồn cung cấp động cơ - 9-42V cho loại 4A và tối đa 32V cho loại 4,5A
- GND : Mặt đất
- A + : Chân dương của cuộn dây 1
- A - : Chân âm của cuộn dây 1
- B + : Chân cực của cuộn dây 2
- B - : Chân âm của cuộn dây 2
Tín hiệu
- PUL (CLK) : Tín hiệu xung điều khiển bước quay động cơ.
- DIR (CW) : Tín hiệu điều khiển chiều quay của động cơ
- ENA : Tín hiệu cho phép/không cho phép modul hoạt động.
- 5V : Điện áp - 5V
Ghi chú
- Kết nối các chân âm với đất và thực hiện điều khiển bằng các chân dương. (Hoạt động -HIGH)
- Kết nối các chân dương với 5 volt và thực hiện điều khiển bằng chân âm. (Hoạt động LOW)
Ghi chú
- Ở loại 4,5A , vì có một chân 5V trong các chân điều khiển, các chân khác được kích hoạt với điện áp THẤP.
Công tắc điều khiển trình điều khiển động cơ bước TB6600
Bạn có thể thay đổi độ phân giải microstep từ bước đầy đủ thành 1/32 bước bằng cách chuyển công tắc S1 sang S3.

Ghi chú
- Không có 1/32 bước trong loại 4,5A .



- Arduino UNO R3
- Trình điều khiển động cơ bước TB6600 4A
- Trình điều khiển động cơ bước TB6600 4.5A
- Động cơ bước BYGH403 1.65A
- Dây jumper đực sang đực
Ứng dụng phần mềm
Arduino IDE
Ghi chú
- Sử dụng nguồn điện có cường độ dòng điện và điện áp thích hợp để cấp điện cho động cơ.
- Đối với hướng dẫn này, chỉ chuẩn bị một loại TB6600.
Giao tiếp trình điều khiển động cơ bước TB6600 với Arduino
Bước 1: Mạch
Ghi chú
- Bạn có thể sử dụng đồng hồ vạn năng để tìm hai dây từ một cuộn dây.
- Đặt đồng hồ vạn năng vào thử nghiệm ngắn mạch và thử nghiệm các dây dẫn theo cặp. Hai dây dẫn bị đoản mạch khi mắc vào đồng hồ vạn năng là hai phía của một cuộn dây.

Ghi chú
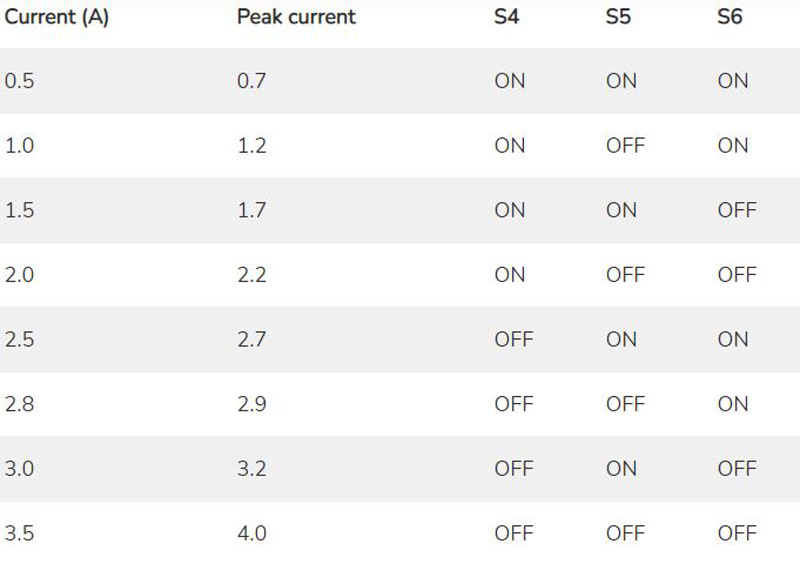
- Bạn có thể giới hạn dòng điện bằng các công tắc nhúng tùy theo nguồn điện mà bạn đã chọn.
- Trong hướng dẫn này, chúng tôi đặt các công tắc 3 và 6 thành Tắt. Do đó, trình điều khiển sẽ ở chế độ đầy đủ bước và dòng điện liên tục là 1.5A .
- Chúng tôi đã kết nối mặt âm của các chân điều khiển với đất và điều khiển các chân này bằng cách ra lệnh cho mặt tích cực. (Hoạt động-Cao)

Bước 2: Code
Tải code sau lên Arduino.*/
#define dirPin 8
#define stepPin 9
void setup() {
// Declare pins as output:
pinMode(stepPin, OUTPUT);
pinMode(dirPin, OUTPUT);
// Set the spinning direction CW/CCW:
digitalWrite(dirPin, HIGH);
}
void loop() {
// These four lines result in 1 step:
digitalWrite(stepPin, HIGH);
delayMicroseconds(500);
digitalWrite(stepPin, LOW);
delayMicroseconds(500);
}
Kết nối chân 8 với DIR (CW) và chân 9 với PUL (CLK). Đặt chân DIR thành Cao. Chiều quay của động cơ bước theo chiều kim đồng hồ ở loại 4A và ngược chiều kim đồng hồ ở loại 4,5A. Sau đó động cơ quay bằng cách tạo xung vuông với chốt bước.
Tiếp theo, chúng tôi muốn thay đổi bước theo cách thủ công bằng các công tắc trình điều khiển. Ví dụ, đầu tiên chúng ta đặt chân S1 và sau đó là S2 thành tắt. Bằng cách này, trình điều khiển bước vào loại 4A, đầu tiên trở thành 1/8 và sau đó là 1/32. Cuối cùng, bằng cách tăng bước, tốc độ động cơ giảm và độ phân giải của nó tăng lên. Trong loại 4,5A, bước trình điều khiển đầu tiên trở thành 1/8 và sau đó dừng lại vì nó không có bước 1/32.